Robot ostrożnie nawigował w kierunku górnej poręczy pokładu zatopionego włoskiego parowca Le Francesco Crispi, znajdującego się około 500 m pod powierzchnią Morza Śródziemnego.
Głównym założeniem OceanOneK było zbadanie miejsc, do których nikt wcześniej nie dotarł, i pokazanie, że ludzki dotyk, wizja i interaktywność mogą być przeniesione do tak oddalonych miejsc, w których mogą działać ludzie.
Warto przeczytać:
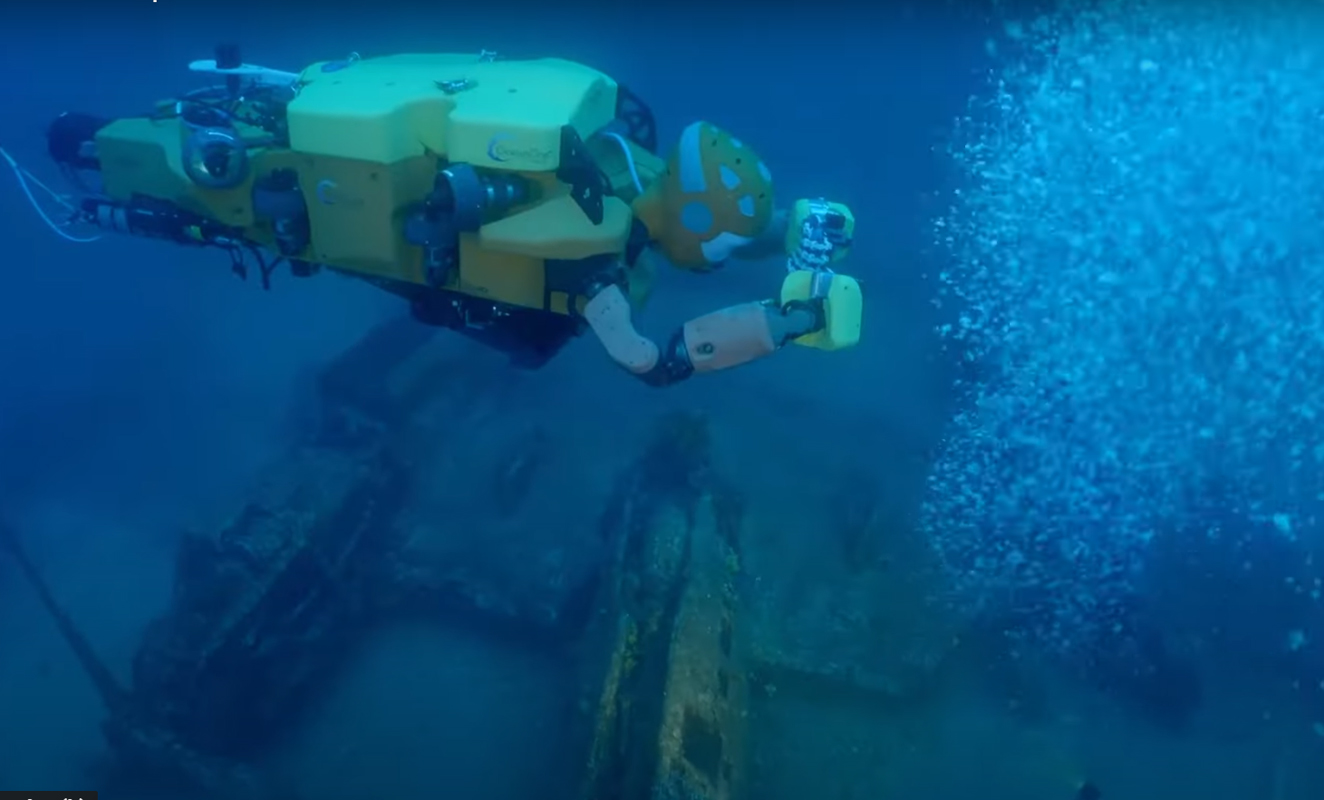
Ten spektakularny sukces był jednocześnie testem i pokazem możliwości OceanOneK, pierwszego robota zbudowanego w połowie z części humanoidalnej i tylnej smuklejszej wyposażonej w osiem wielokierunkowych pędników, które umożliwiają ostrożne i precyzyjne manewrowanie pod wodą. Wbudowany haptyczny system komunikowania się poprzez zmysł dotyku, przy użyciu zmieniających się sił, wibracji i ruchów robota, umożliwił kontrolerowi odczuwanie niewiarygodnie realistycznych wrażeń.
Pierwsze głębokie nurkowanie
Nurkowanie na wraku Crispi było częścią wieloprzystankowej trasy po Morzu Śródziemnym dla OceanOneK, która rozpoczęła się we wrześniu 2021 roku z dwoma przystankami w pobliżu Marsylii do samolotu P-38 Lightning z II wojny światowej na 40 m (około 130 stóp) i łodzi podwodnej, Le Protée, na 124 m (mniej więcej 400 stóp). Trzecim był rzymski statek z II wieku w Aléria na Korsyce na 334 m (prawie 1100 stóp), a na koniec wrak Cripsi.

W poszukiwaniu odpowiedniej pogody zespół skierował się w stronę Cannes.
Tam kamera na wysięgniku robota miała swoje pierwsze zastosowanie w oglądaniu wnętrza kokpitu samolotu Beechcraft Baron F-GDPV, który znajdował się 67 m w dół (ponad 200 stóp). Ostatnie nurkowanie odbyło się na głębokości 852 m, gdzie po zatrzymaniu się na sprawdzenie pędników zespół stwierdził, że robot nie jest w stanie się wznieść.
Tam kamera na wysięgniku robota miała swoje pierwsze zastosowanie w oglądaniu wnętrza kokpitu samolotu Beechcraft Baron F-GDPV, który znajdował się 67 m w dół (ponad 200 stóp). Ostatnie nurkowanie odbyło się na głębokości 852 m, gdzie po zatrzymaniu się na sprawdzenie pędników zespół stwierdził, że robot nie jest w stanie się wznieść.
OceanOneK był w pełni sprawny, ale załamały się flotacje wokół linii komunikacyjnej i energetycznej łączącej go z górą, pozostawiając długą, ciężką linę spiętrzoną na szczycie robota. Po wciągnięciu luzu kontynuowano nurkowanie.
Na pamiątkę OceanOneK umieścił na dnie morza tablicę z napisem:
Najczęściej czytane:
Pierwsze dotknięcie dna morskiego przez robota. Ogromny nowy świat dla ludzi do zbadania.
Zobacz także:
Podczas dwóch wielostopniowych rejsów wokół Morza Śródziemnego OceanOneK miał wiele godnych uwagi przygód i sukcesów, ale nadrzędnym osiągnięciem było zademonstrowanie funkcjonalnej autonomii na głębokości prawie 1000 m. To właśnie ten postęp sprawił, że OceanOne zmienił nazwę na OceanOneK.
„Po raz pierwszy robot był w stanie zejść na taką głębokość, wejść w interakcję ze środowiskiem i pozwolić ludzkiemu operatorowi poczuć to środowisko” – powiedział Khatib. „To była niesamowita podróż”.

Wyprawa robota OceanOneK na odległość 1 km była długo przygotowywana.
Zaczęło się od niezliczonych godzin projektowania, eksperymentów i montażu z członkami zespołu w laboratorium, dziesiątek wycieczek do basenu w Stanford w celu usunięcia usterek i niezliczonych lekcji, które należało wyciągnąć, zanim stanęliśmy w obliczu nieprzewidywalności prawdziwego świata.
Lipcowa ekspedycja
Tego lata zespół miał drugą szansę na nurkowanie do rzymskiego wraku Crispi. Podczas pierwszej interakcji z rzymskim statkiem, zespół próbował — ale nie udało się — odzyskać lampy olejowej ze statku. Usterka ramienia uniemożliwiła wówczas użycie kamery na wysięgniku.
OceanOneK ponownie zanurzył się na rzymski statek, tym razem pod czujnym okiem zespołu archeologów, i z powodzeniem wydobył garść cennych starożytnych waz datowanych na okres Cesarstwa Rzymskiego, w tym kilka niewidzianych wcześniej w zbiorach francuskiego DRASSM. Były to wyjątkowe znaleziska, ponieważ nadal nosił nazwę i etykietę producenta.
Podczas drugiego nurkowania na wraku Crispi, operator Khatib rozszerzył kamerę na wysięgniku do pękniętego kadłuba statku, uważając, aby nie dotknąć krawędzi pęknięcia. Biolog morski zespołu poprowadził go i z niecierpliwością obserwował, jak zewnętrzne koralowce ustępują miejsca wewnętrznym formacjom rdzy w kształcie sopli, które pokazały efekty około osiemdziesięciu lat interakcji bakterii z żelazem statku.
Nowe wyzwania
Planowane są kolejne ekspedycje w różnych lokalizacjach na całym świecie, w tym zaginione miasta zakopane w głębokich jeziorach, rafy koralowe i archeologicznie znaczące wraki na głębokościach tak daleko poza zasięgiem człowieka, że OceanOne stanowi wyjątkową okazję do zrozumienia przeszłości.
Projekt OceanOne uosabia nie tylko zaawansowane innowacje w dziedzinie haptyki, robotyki podwodnej i interakcji człowiek-robot, ale także pokazuje nowe możliwości dla nauk morskich i inżynierii podwodnej, takie jak inspekcja i naprawa łodzi i infrastruktury, w tym podpór mostów i podwodnych rurociągów.